


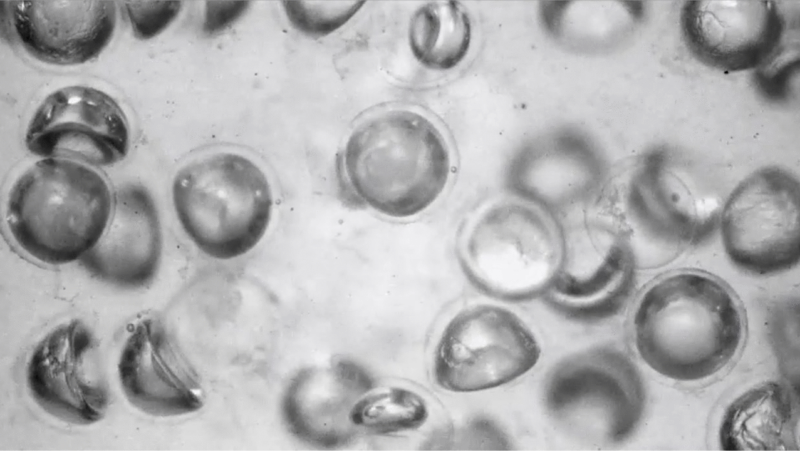
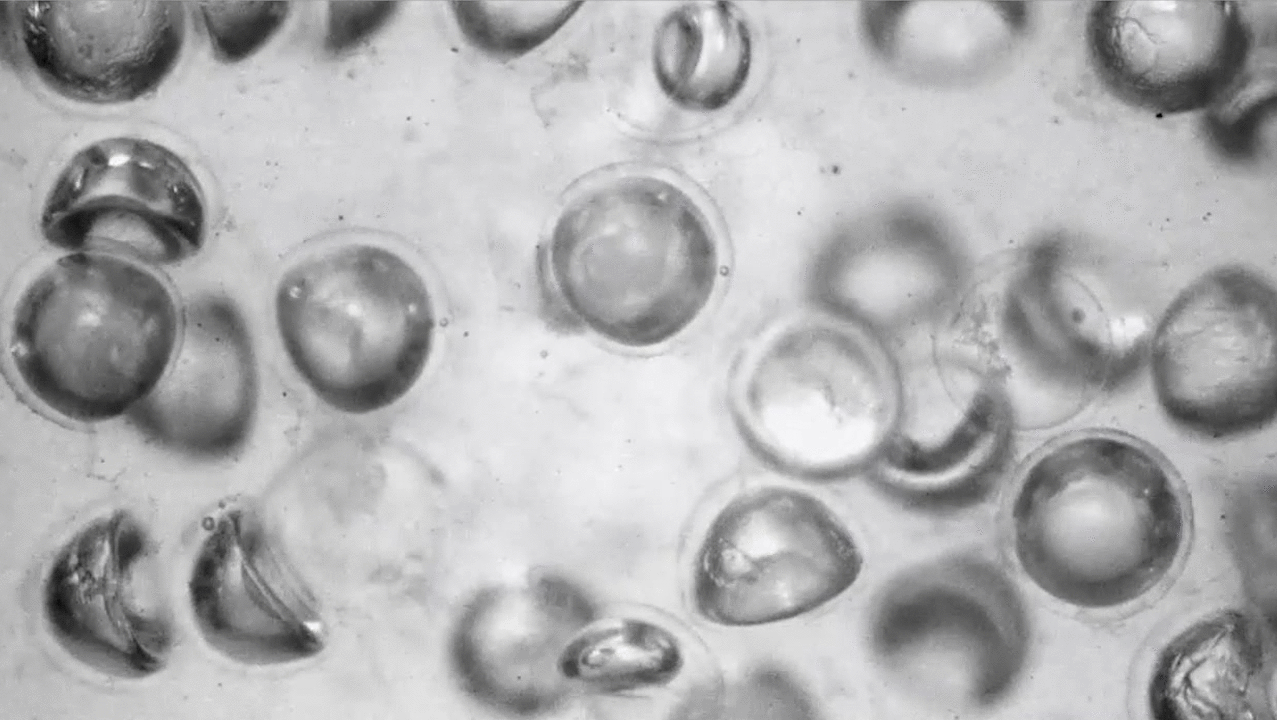
Enlarge / At critical pressures, the fluid's spheres become a mixture of different states. (credit: Adel Djellouli/Harvard SEAS)
Building a robot that could pick up delicate objects like eggs or blueberries without crushing them took lots of control algorithms that process feeds from advanced vision systems or sensors that emulate the human sense of touch. The other way was to take a plunge into the realm of soft robotics, which usually means a robot with limited strength and durability.
Now, a team of researchers at Harvard University published a study where they used a simple hydraulic gripper with no sensors and no control systems at all. All they needed was silicon oil and lots of tiny rubber balls. In the process, they’ve developed a metafluid with a programmable response to pressure.
Swimming rubber spheres
“I did my PhD in France on making a spherical shell swim. To make it swim, we were making it collapse. It moved like a [inverted] jellyfish,” says Adel Djellouli, a researcher at Bertoldi Group, Harvard University, and the lead author of the study. “I told my boss, 'hey, what if I put this sphere in a syringe and increase the pressure?' He said it was not an interesting idea and that this wouldn’t do anything,” Djellouli claims. But a few years and a couple of rejections later, Djellouli met Benjamin Gorissen, a professor of mechanical engineering at the University of Leuven, Belgium, who shared his interests. “I could do the experiments, he could do the simulations, so we thought we could propose something together,” Djellouli says. Thus, Djellouli’s rubber sphere finally got into the syringe. And results were quite unexpected.
Read 14 remaining paragraphs | Comments
Ars Technica - All contentContinue reading/original-link]

{kind=link}
{kind=link}